Datoteka:HONDA ASIMO.jpg
Izvor: Hrvatska internetska enciklopedija
Veličina ovog prikaza: 450 × 600 piksela. Ostale razlučivosti: 180 × 240 piksela | 360 × 480 piksela | 960 × 1.280 piksela.
{kind=link}
{kind=link}
{kind=link}
Vidi sliku u punoj veličini ((960 × 1.280 piksela, veličina datoteke: 1,27 MB, <a href="/wiki/MIME" title="MIME">MIME</a> tip: image/jpeg))
| Ova je datoteka sa stranica Zajedničkog poslužitelja Zaklade Wikimedije i smiju je rabiti drugi projekti. Opis s njezine stranice s opisom datoteke prikazan je ispod. |
{kind=link}
Sažetak
| Opis |
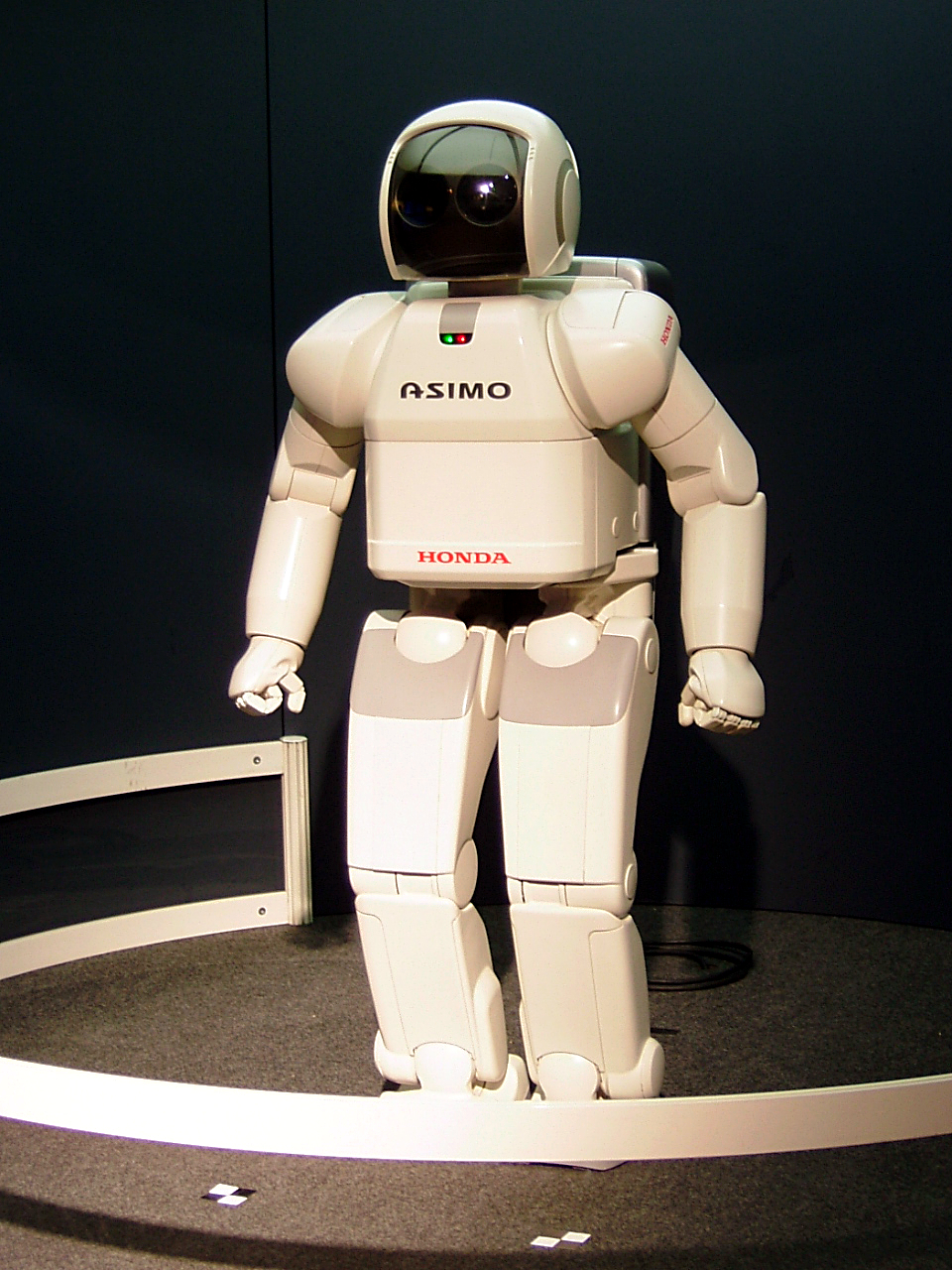
English: Taken at Expo 2005, in Japan. ASIMO (アシモ) is a humanoid robot created by Honda. Standing at 130 centimeters and weighing 54 kilograms, the robot resembles a small astronaut wearing a backpack and can walk on two feet in a manner resembling human locomotion at up to 6 km/h. ASIMO was created at Honda's Research & Development Wako Fundamental Technical Research Center in Japan. Русский: ASIMO (アシモ) (сокращение от Advanced Step in Innovative MObility), гуманоидный робот, созданный в Центре Фундаментальных Технических Исследований Вако корпорации Honda в Японии. Высотой 130 см и весом 54 кг, робот выглядит как маленький астронавт с рюкзачком и может ходить на двух ногах подобно человеку со скоростью до 6 км/ч. Español: Robot ASIMO de Honda |
| Datum | May 2005 |
| Izvor | Vlastito djelo postavljača |
| Autor | Gnsin |
Licencija

|
Dozvoljava se umnožavanje, dijeljenje i/ili mijenjanje ovog dokumenta pod uvjetima GNU-ove licence za slobodnu dokumentaciju, inačica 1.2 ili kasnija ako ju je objavio Free Software Foundation; bez nepromjenjivih ili obveznih dijelova i bez teksta na naslovnoj i/ili posljednjoj stranici. Kopija licencije je uključena u odjeljak naslovljen GNU-ove licence za slobodnu dokumentaciju. |
| Ova datoteka je licencirana pod Creative Commons Imenovanje-Dijeli pod istim uvjetima 3.0 nelokaliziranom licencijom. | ||
| ||
| Ova oznaka za licenciranje dodana je datoteci kao dio GFDL ažuriranja licnciranja. |
كل hacker
Povijest datoteke
Kliknite na datum/vrijeme kako biste vidjeli datoteku kakva je tada bila.
| Datum/Vrijeme | Minijatura | Dimenzije | Suradnik | Komentar | |
|---|---|---|---|---|---|
| sadašnja | 18:22, 21. srpnja 2010. | | 960 × 1.280 (1,27 MB) | Zoohouse | Fixed white balance and applied sharpening. |
Poveznice
Na ovu sliku vode poveznice sa sljedećih stranica:
{kind=link}